Tensegrity-based Formation Control Strategies for Unmanned Vehicles
Supervisor: Dr W Naeem
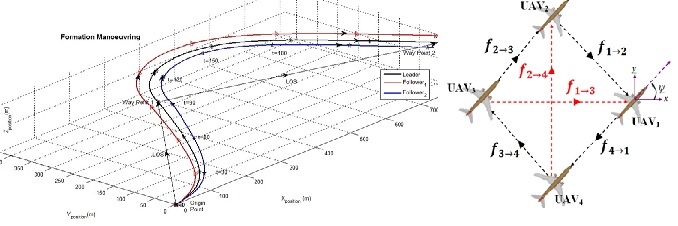
Formation control is a matter of controlling the relative position and orientation of an ensemble of autonomous vehicles while allowing the group to move as a whole in a stable configuration. It is proven that moving a group of vehicles is more beneficial than a single vehicle in the presence of uncertain and adverse environments. It is also well known that formation systems have many advantages such as wide area sensing coverage and system energy conservation due to the reduction of friction in each vehicle. Specific applications include exploration, search and rescue, microsatellite clusters and transportation of large and heavy objects. Problems to set up in co-operative formation control often involve achieving formation, maintaining formation and dynamic switching between different formation shapes whilst carrying out a task. In this project, formation dynamics of a group of vehicles is synthesised and analysed using a virtual tendon-driven tensegrity system.