
Progress Report - January 2012
Good progress has been made on developing COLREGs-compliant path planning algorithms. Currently, modified forms of A* are being developed in addition to integrating the dynamics of various types of vessels.
A ship simulator package, 'Virtual Simulator' has been procured for training and generating videos to be used for obstacle detection purposes.
For obstacle detection, the hardware include a high-definition camera in conjunction with a laser range sensor. Standard background subtraction techniques along with Kalman filter based prediction algorithms are employed to estimate the current position of the obstacle and its projected position in the future.
Publications
1. Naeem, W, Irwin, GW and Yang, A, "COLREGs-based Collision Avoidance Strategy for Unmanned Surface Vehicles", Mechatronics 2011, DOI information: 10.1016/j.mechatronics.2011.09.012
2. Naeem, W and Irwin GW, "Evasive Decision Making in Uninhabited Maritime Vehicles", In Proceedings of the IFAC World COngress, Milan, Italy, Aug/Sep 2011.
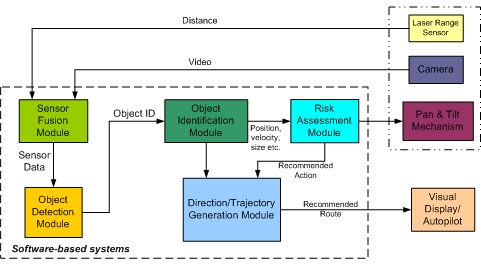
A decision support framework for collision detection and avoidance system for unmanned marine vehicles