
Progress Report - May 2012
Obstacle Detection and Identification System
A Collision Avoidance system for Unmanned Maritime Vehicles has been designed and implemented. The proposed system employs a high definition video camera and a laser range sensor mounted on a pan and tilt device to detect obstacles in the vicinity of the ship. The reasons behind employing the pan and tilt devices are (a) to increase the coverage range and (b) to act as a stabiliser for the high definition video camera and the laser sensor mounted on it. Figure 1 shows the proposed system in operation.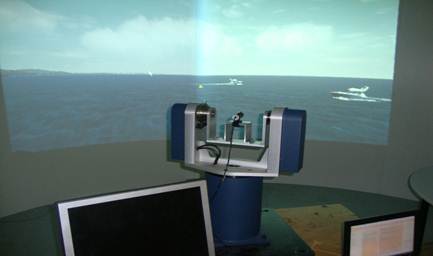 Figure 1. The proposed ODA system in operation
Figure 1. The proposed ODA system in operation

Figure 2. Detecting multiple dynamic ships by the obstacle detection and identification subsystem
Additionally, different software based subsystems have been implemented for the proposed solutions including Obstacle Detection/identification, Risk Assessment Unit and prediction subsystems. An extensive performance evaluation of the proposed system in virtual maritime environments has been conducted. Figure 2 shows the obstacle detection and identification subsystem has successfully detected the two cruisers present in the scene in real-time.
Figure 3 shows the captain radar screen. The figure illustrates this scenario in which the risk assessment unit requests the pan and tilt device to re-scan sector 2. The request can be seen at the top of the virtual map and will be highlighted for the operator.
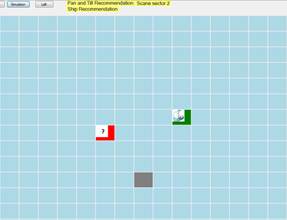 Figure 3. A snapshot of the virtual map showing the recommended action for the pan and tilt subsystem
Figure 3. A snapshot of the virtual map showing the recommended action for the pan and tilt subsystem
Publications
- Campbell, S, Naeem , W and Irwin, G, W, "Improving the Autonomy of Unmanned Surface Vehicles through Intelligent Collision Avoidance Behaviours", Submitted to IFAC Journal of Annual Reviews in Control, 2012.
- Campbell, S and Naeem, W, "A Rule-Based Heuristic method for COLREGS-compliant Collision Avoidance for an Unmanned Surface Vehicle", Submitted to 9th IFAC Conference on Manueovring and Control of Marine Craft, Arenzano, Italy, September 2012.
- Abu-Tair, M and Naeem, W, "A Decision Support Framework for Collision Avoidance of Unmanned Maritime Vehicles", Submitted to 9th IFAC Conference on Manueovring and Control of Marine Craft, Arenzano, Italy, September 2012.