Image Gallery

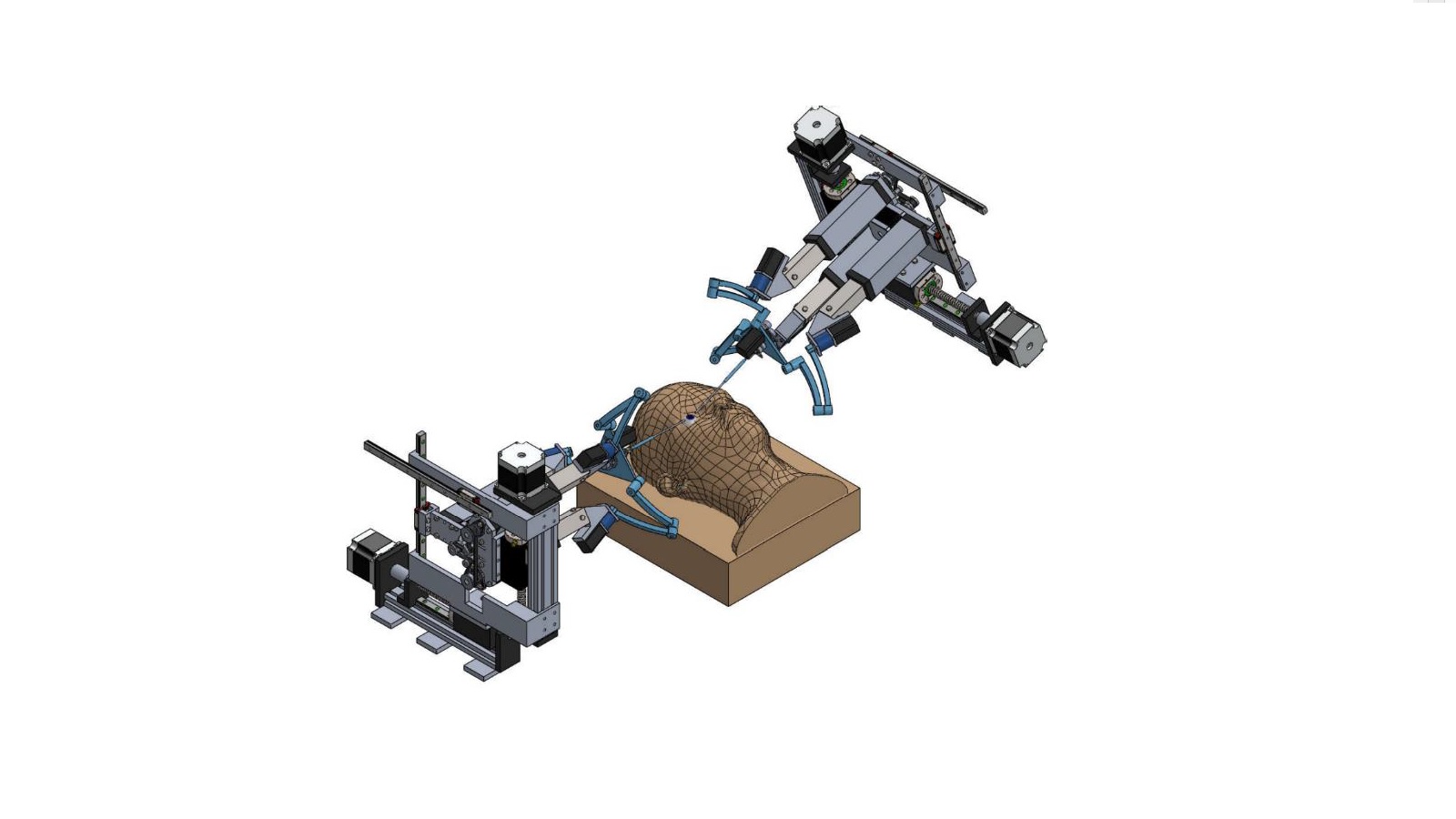
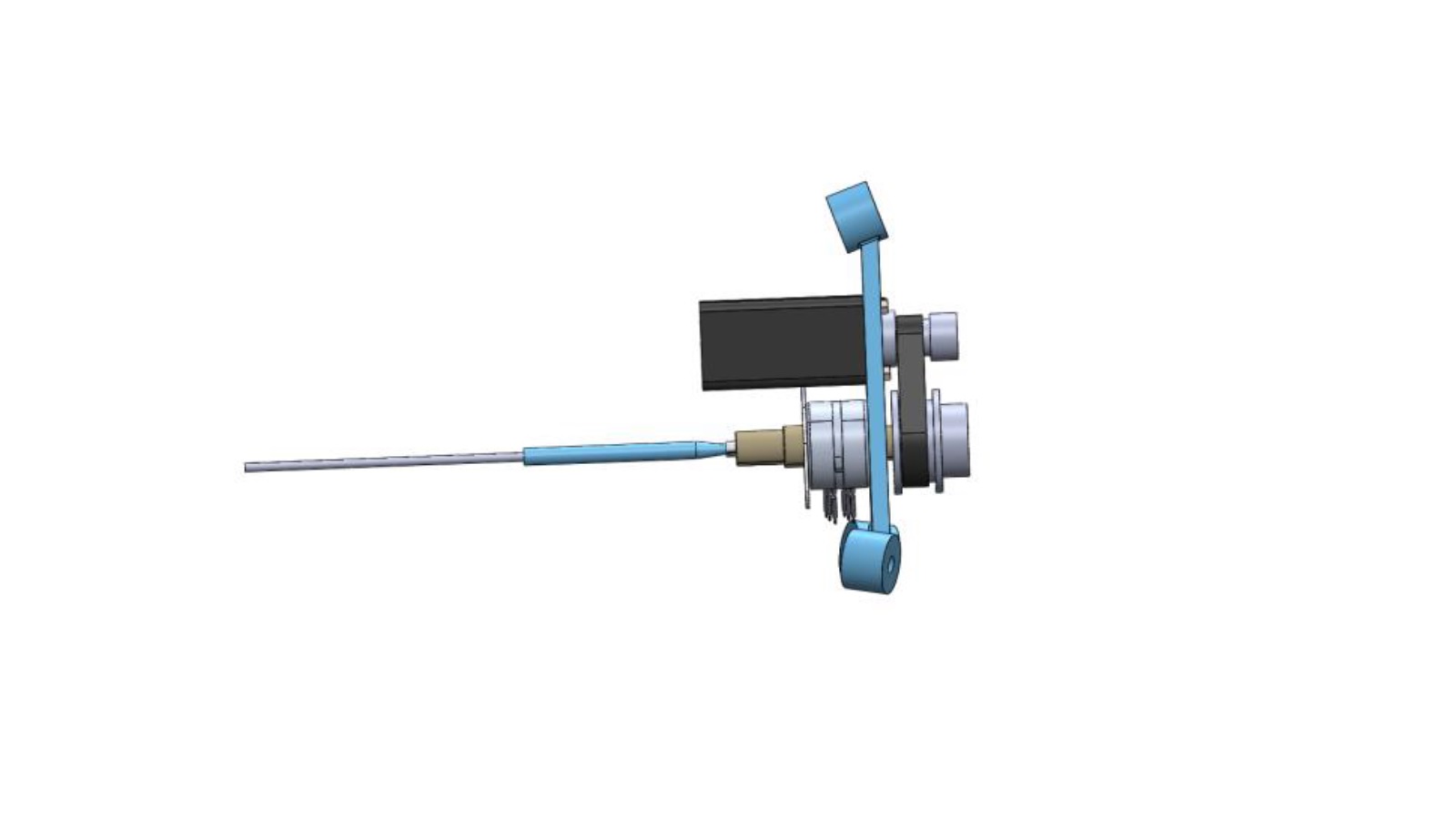
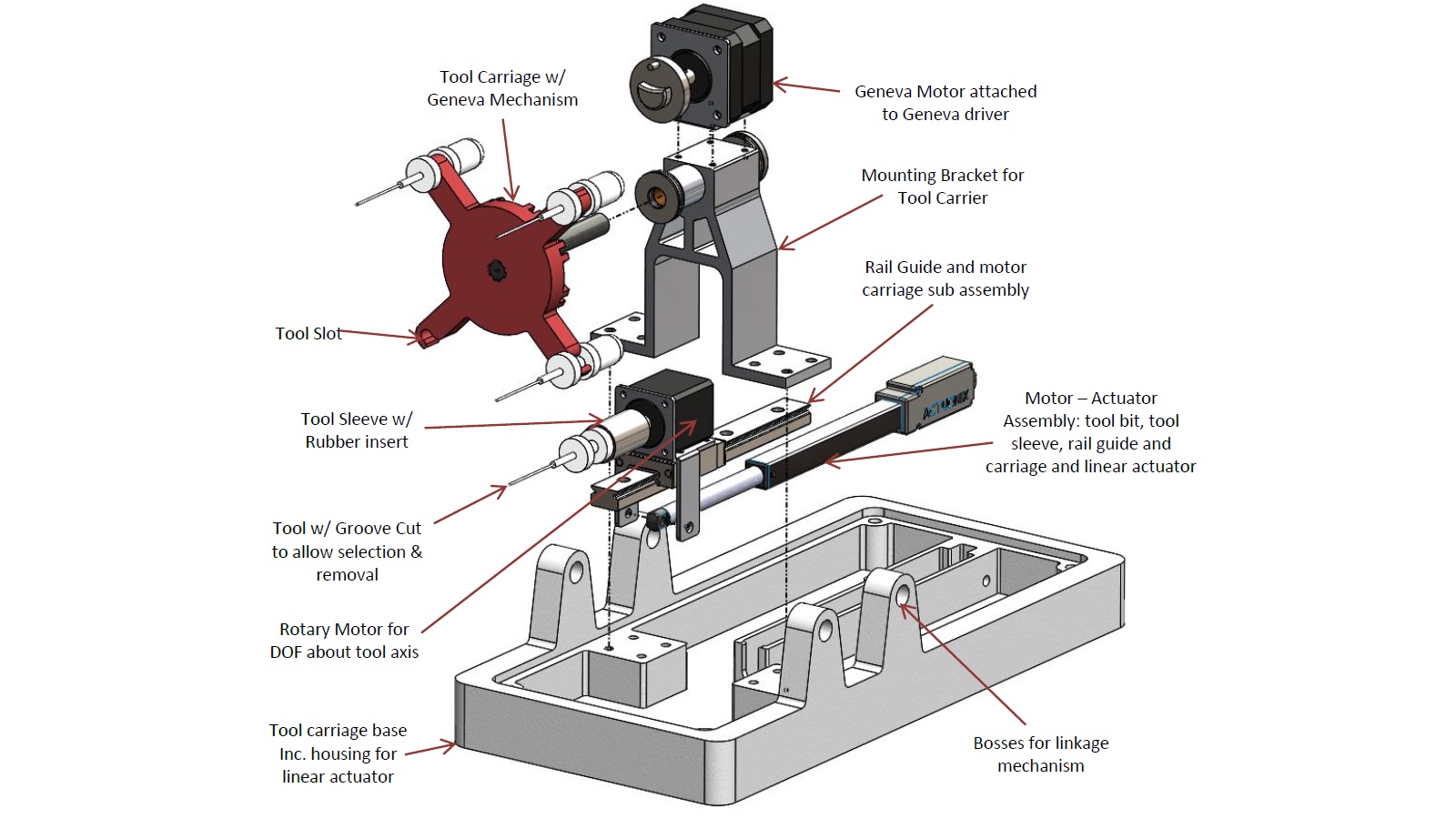
The robot developed has two arms, each with four degrees of freedom, two remote centres of motion and a novel tool change mechanism with four slots. The robot was deemed to have sufficient ranges of motion to perform the surgery. This method required inputs of tool angles, displacements and execution times which were known from the video footage, the simulation yielded kinematic and dynamic output data that was useful for robot design. This research overcame a number of shortcomings in some of the existing surgical robots and manual surgery. This includes the development of a novel tool changer, simulation of a cataracts removal procedure and an estimated time saving of 20% within this removal procedure. This robot represents significant progress towards a design that is suitable for fully autonomous cataracts surgery.
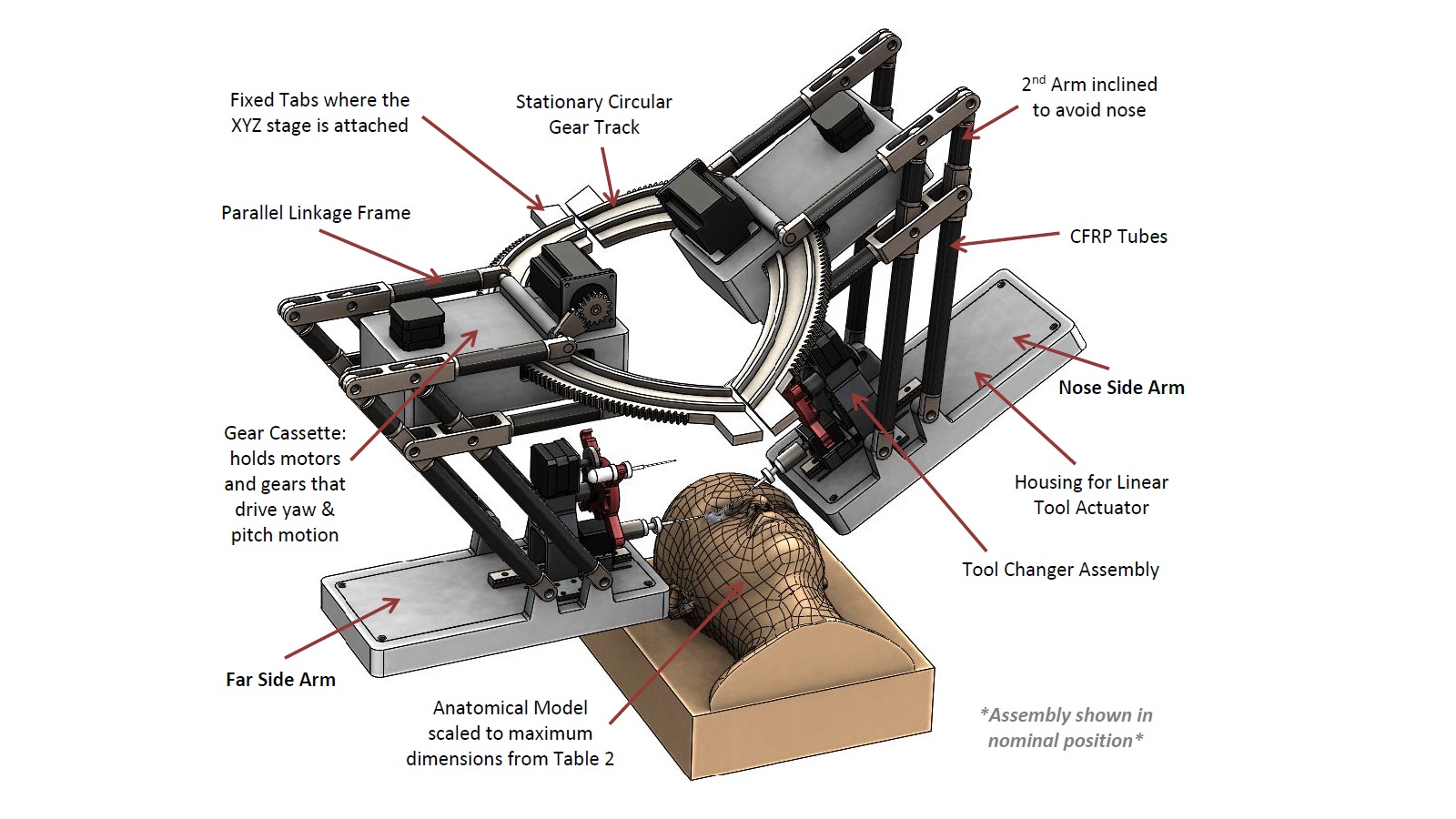
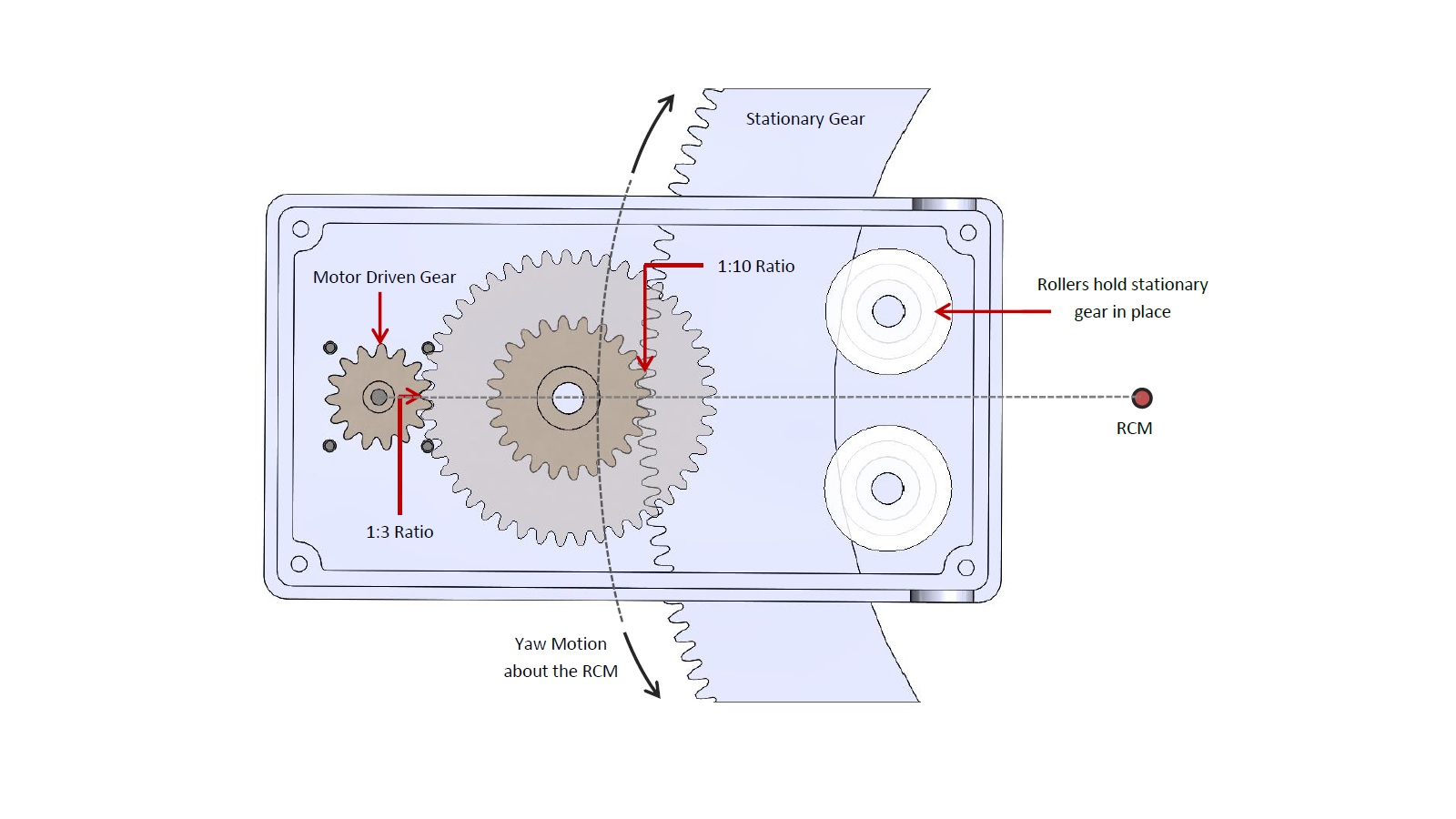
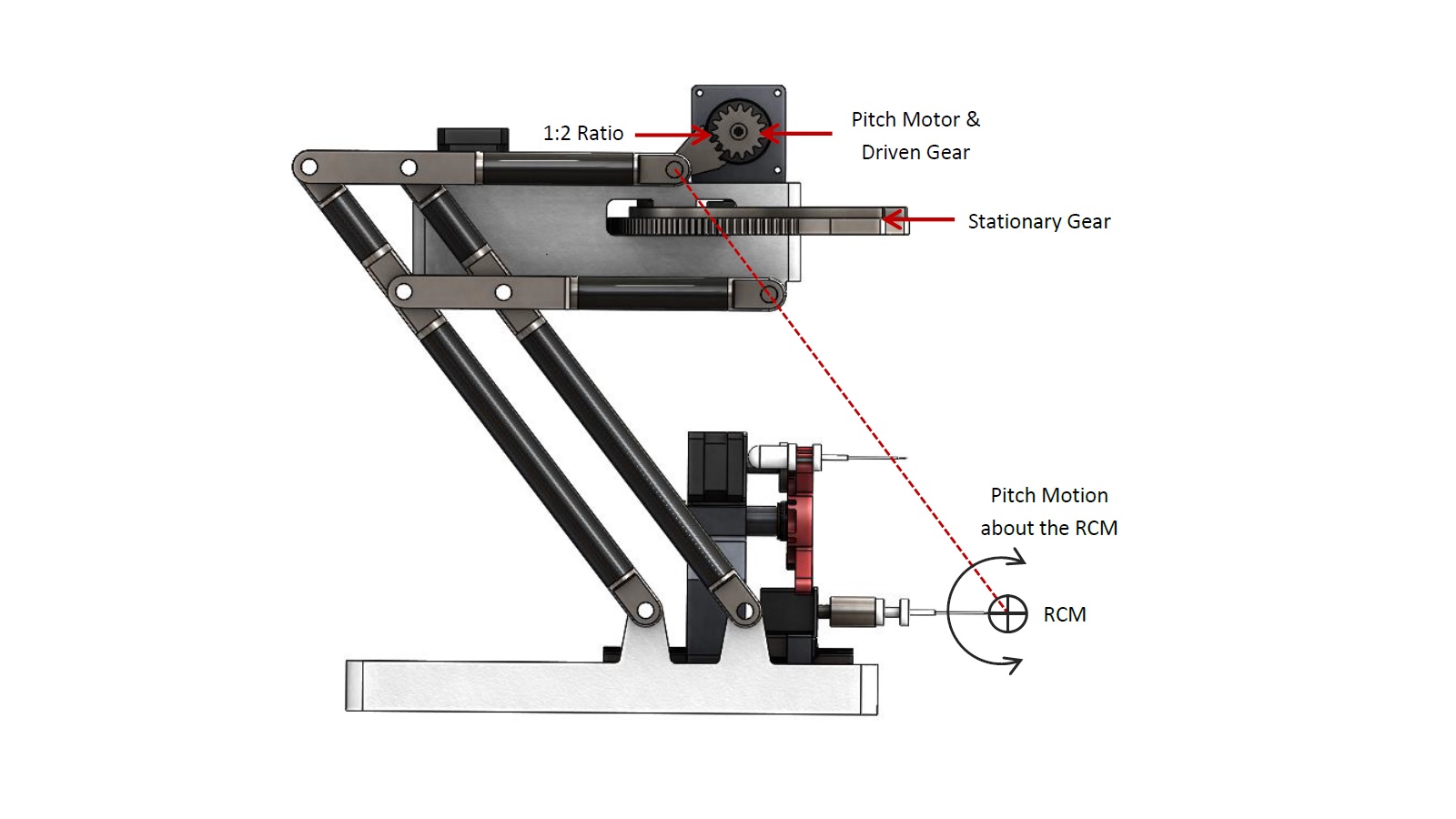

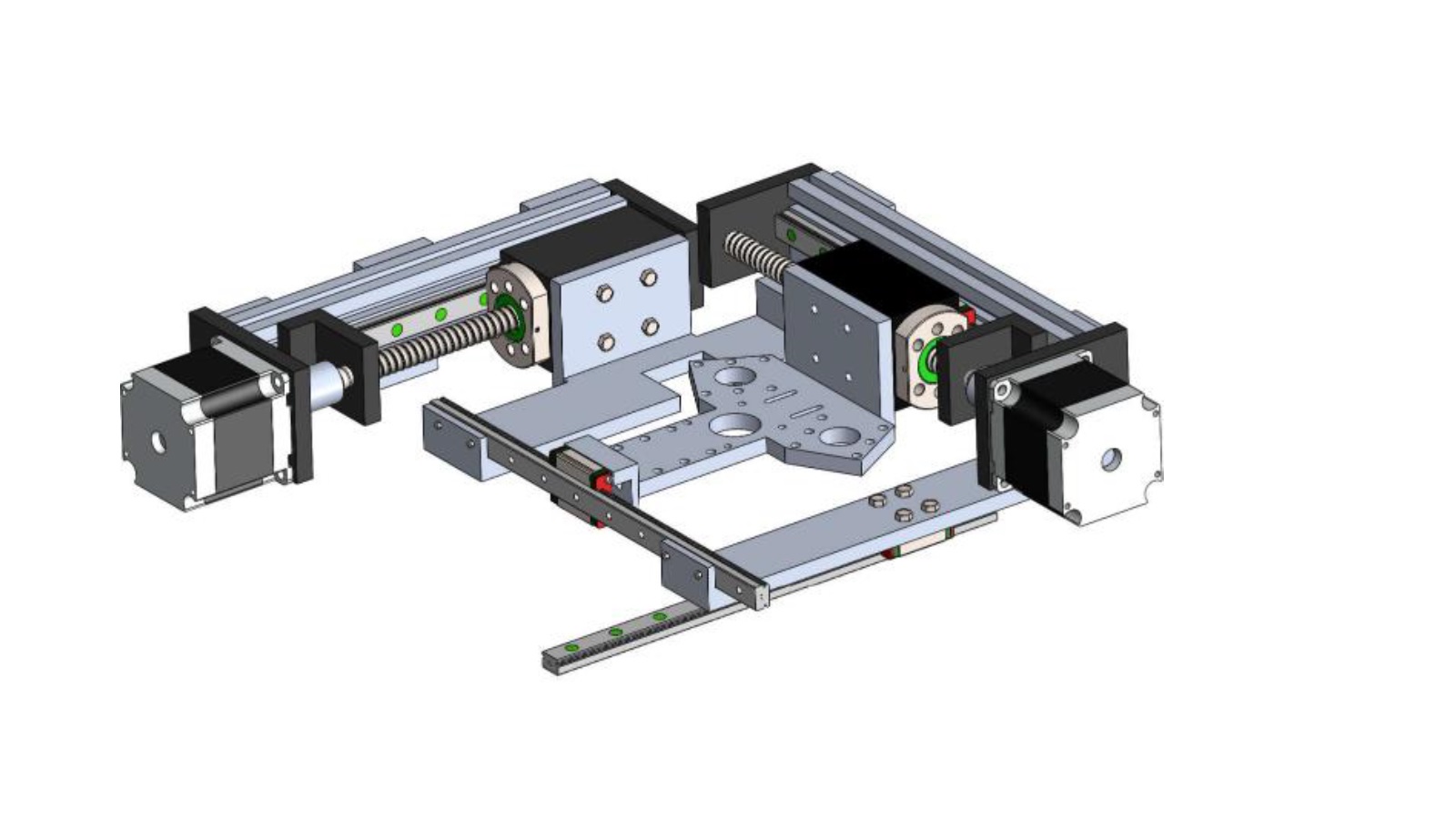
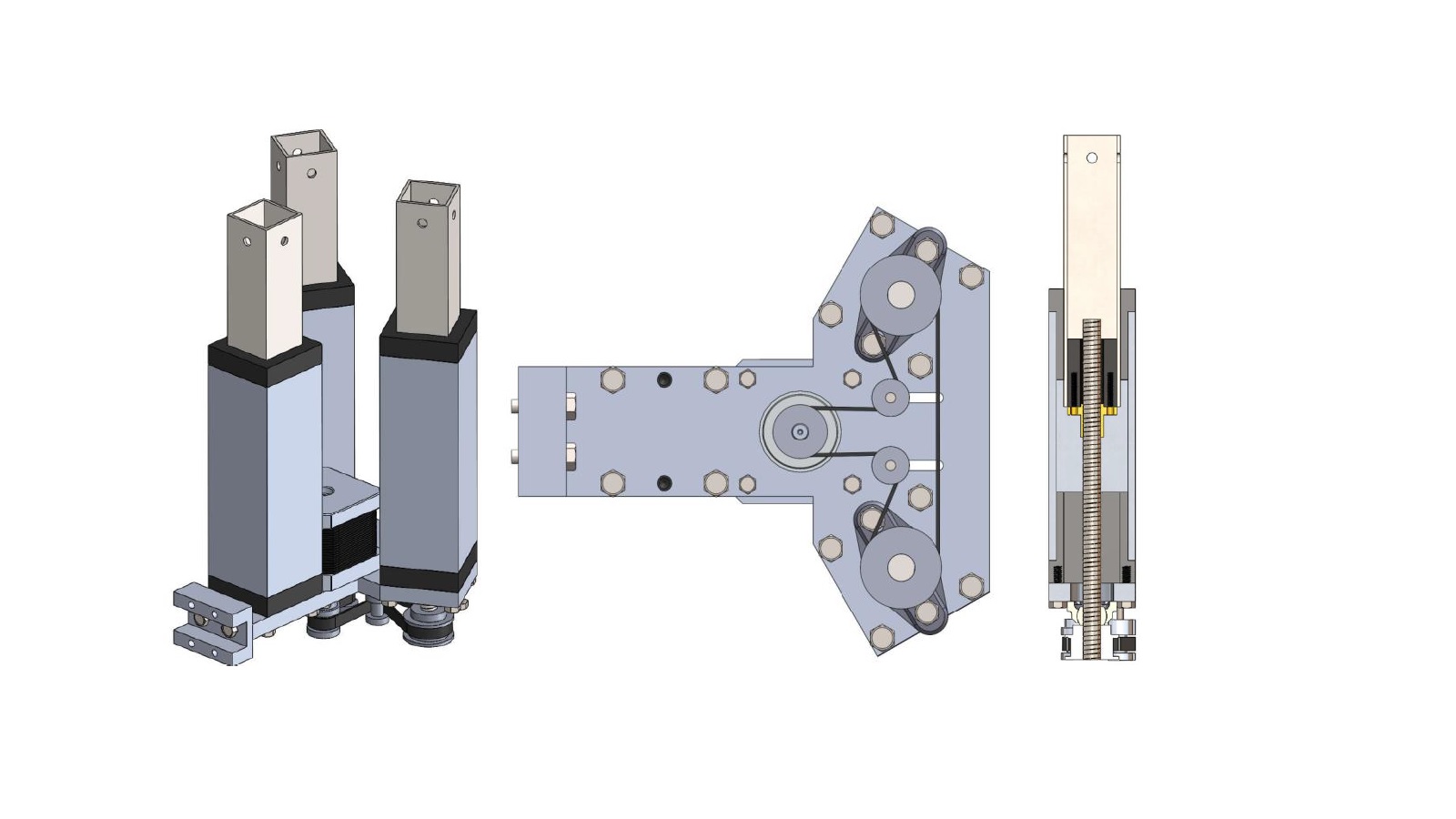
The design allowed the robot to move a surgical tool with seven degrees of freedom. A simulation was created to assess the robot’s range of motion for all seven DOFs. It appeared that all motion requirements could be Motors were selected to actuate the aforementioned degrees of freedom, based mainly on their accuracy, size and ease of programming. Motor drivers and controllers were also identified. A prototype of the top section of the design, which is used to rotate the tool about the RCM and translate the tool about the RCM was manufactured. The robot was also wired and control was added. Testing was carried out to validate the prototypes ability to conduct an eye surgery, some highlighted the prototypes promise, while others identified areas for improvement.